RILIEVO DI GIARDINI STORICI: FOTOGRAMMETRIA MULTI-CAMERA E LASER SCANNER PORTATILE A CONFRONTO
Abstract
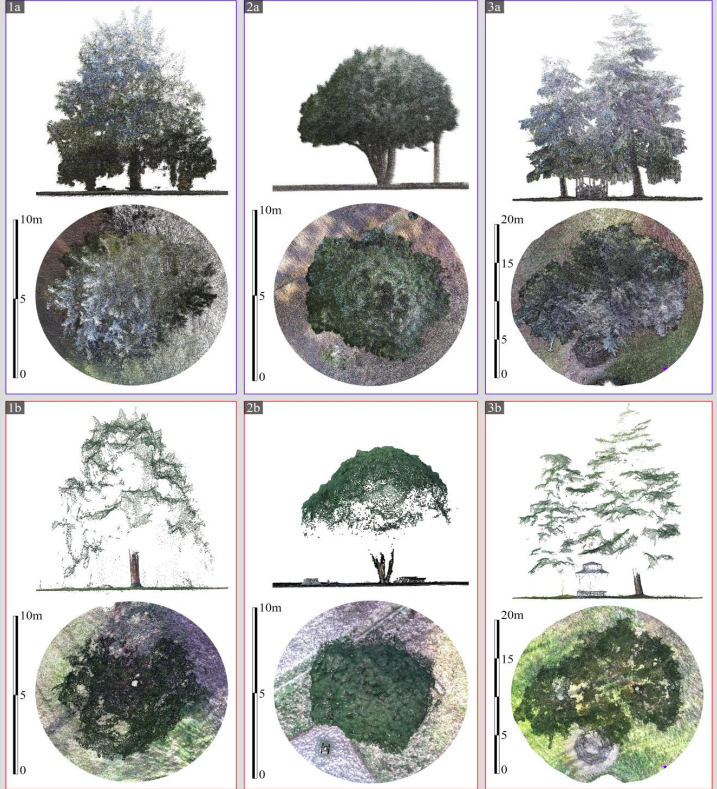
Il presente lavoro presenta un'indagine sulla caratterizzazione dei giardini storici confrontando due metodologie di rilievo 3D. In questo contesto, gli approcci che impiegano laser scanner statici sono considerati i più accurati, mentre i laser scanner portatili sono considerati promettenti grazie alla loro estrema produttività. Meno comune è l'uso della fotogrammetria. Questo articolo confronta due approcci basati sull'uso di un Mobile Mapping System (MMS) indossabile e sull'uso di uno strumento fotogrammetrico multi-camera. Il confronto mira a valutare l'applicabilità delle due tecniche in questo campo, valutandone vantaggi e svantaggi nel rilievo di un giardino storico e nell'estrazione di informazioni riguardo le alberature, come il DBH (Diameter at Breast Height) e l'impronta della chioma. Abbiamo confrontato la praticità delle operazioni di rilievo e di elaborazione, nonché la qualità e le caratteristiche delle nuvole di punti ottenute. Entrambi i sistemi hanno prodotto una rappresentazione densa del terreno. Il rilievo multi-camera è risultato più definito grazie al minor rumore della nuvola di punti, ma incompleto nella definizione delle chiome degli alberi. Il DBH dei tronchi degli alberi può essere estratto con entrambi i sistemi, ad eccezione dei tronchi più sottili e di diametro più fine rilevati dall'approccio MMS, ma non sempre dalla multi-camera. L'approccio MMS si è rivelato più efficace grazie al minor tempo di rilievo necessario per coprire un'area uguale e al fatto che il solo rilievo MMS è sufficiente per la descrizione geometrica degli alberi. Al contrario, l'approccio multi-camera non può evitare l'integrazione con un rilievo aereo per la ricostruzione della chioma.
Downloads
Pubblicato
Come citare
Fascicolo
Sezione
Licenza
Copyright (c) 2025 Luca Perfetti, Giorgio Vassena, Francesco Fassi (Autore)

Questo lavoro è fornito con la licenza Creative Commons Attribuzione - Condividi allo stesso modo 4.0.